|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
ENCICLOPEDIA DE RADIOELECTRÓNICA E INGENIERÍA ELÉCTRICA Indicador de transmisión. Enciclopedia de radioelectrónica e ingeniería eléctrica.
Enciclopedia de radioelectrónica e ingeniería eléctrica. / Automóvil. Dispositivos electrónicos La base para el desarrollo y fabricación de este indicador de la marcha engranada de la caja de cambios de un automóvil fue el dispositivo descrito en el artículo de S. Gulyaev “Indicador de la marcha engranada” (Radio, 2010, No. 6, p. 41). Es suficiente decir que un puntero de este tipo es útil tanto para principiantes como para conductores experimentados como para que desee crear un dispositivo de este tipo e instalarlo en su automóvil. Pero el autor de este artículo quería mejorarlo añadiendo algunas funciones nuevas. Una característica distintiva del indicador de marcha propuesto es la indicación de que no solo están engranadas las marchas de avance, sino también la marcha atrás, así como el freno de mano. Además, en determinados casos, se muestran flechas en el indicador que recomiendan al conductor cambiar a una marcha más alta o más baja. Al instalar un sensor simple para la posición neutral de la palanca de cambios en un automóvil, el indicador también lo indica. Y cuando se arranca el motor, pero el coche no se mueve, la aguja se convierte en un tacómetro casi analógico.
El diagrama de puntero se muestra en la Fig. 1. Dado que el dispositivo que ensamblé está instalado en un automóvil VAZ-2110, los números de posición de los conectores X1 y X2 y los números de sus contactos corresponden al diagrama del circuito del grupo de instrumentos de este automóvil. El puntero se basa en el microcontrolador DD1, alimentado por un generador de reloj RC interno. Al comenzar a funcionar, el programa del microcontrolador configura los pines de sus puertos como entradas y salidas de acuerdo con su asignación en el índice y desactiva los módulos internos no utilizados. Luego, se analizan cíclicamente las señales de los sensores de velocidad y de régimen del motor, el interruptor de luz de marcha atrás, los sensores de contacto del freno de estacionamiento, el punto muerto y el interruptor de modo de calibración SA1, y se verifica la presencia del puente S1. A partir de los resultados del análisis de estas señales, en el indicador LED matricial HG1 se forman imágenes de símbolos que caracterizan la marcha engranada y algunas situaciones especiales. La información se muestra en el indicador HG1 en modo dinámico. Si se utiliza un indicador con ánodos LED comunes para cada columna de la matriz, por ejemplo TA07-11EWA, debería faltar el puente S1. En este caso, en cada una de las salidas RB3-RB7 del microcontrolador, el programa alternativamente, en ciertos intervalos, establece el voltaje en un nivel lógico alto con un nivel bajo en las otras cuatro salidas. Esto selecciona una de las columnas LED del indicador HG1. Cuál de los LED de la columna seleccionada se encenderá está determinado por el código cargado por el microcontrolador a través de las salidas RA0 y RA1 en el registro de desplazamiento DD2. Un nivel bajo en la salida del registro significa que el LED de la columna de matriz actualmente activa conectada a ella por el cátodo está encendido, y un nivel alto significa que está apagado. Una vez transcurrido el tiempo establecido, el programa selecciona la siguiente columna y carga el código destinado a ella en el registro de desplazamiento. Debido a la inercia de la visión, todos los LED que forman el símbolo mostrado parecen estar encendidos al mismo tiempo. Si se utiliza un indicador con cátodos comunes de los LED de cada columna, por ejemplo TC07-11EWA, se debe instalar el jumper S1. En este caso, los pulsos en las salidas RB3-RB7 y los códigos cargados en el registro de desplazamiento DD2 se invertirán mediante software, que es lo que se requiere para que dicho indicador funcione.
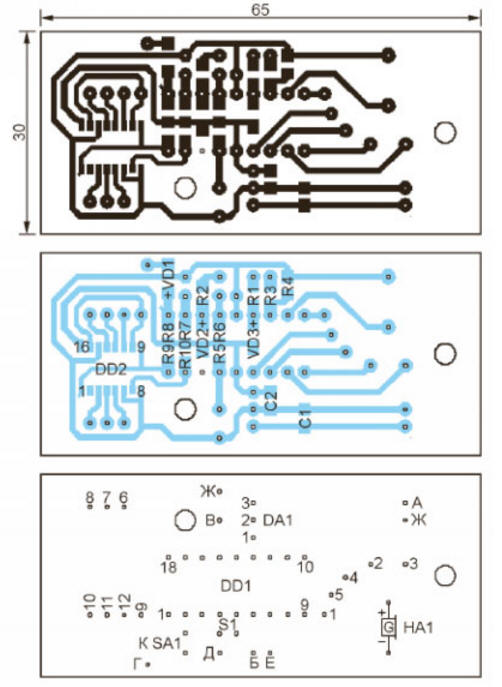
La mayoría de las piezas del puntero están ubicadas en la placa de circuito impreso que se muestra en la Fig. 2, y el indicador HG1 con resistencias de extinción R11-R17 está en una pequeña placa de circuito impreso separada que se muestra en la Fig. 3. Las placas están conectadas entre sí mediante un mazo de cables y los números de las almohadillas de contacto a las que están soldadas coinciden con los números de cables en ambas placas según el diagrama de la Fig. 1. Las placas están diseñadas para instalar resistencias y condensadores para montaje en superficie de tamaño 1206. Los diodos VD1-VD3 y un registro de desplazamiento DD2 también se encuentran en paquetes de montaje en superficie.
El tablero con el indicador se coloca en un lugar conveniente para que el conductor observe sus lecturas. La placa principal se monta sobre soportes en la parte trasera del grupo de instrumentos del vehículo o se coloca en una carcasa de dimensiones adecuadas. Las conexiones entre el indicador y el grupo de instrumentos se realizan utilizando trozos de cable de montaje. Si el automóvil está parado y el freno de mano está puesto (el cátodo del diodo VD1 está configurado en un nivel de voltaje lógicamente bajo), en el indicador se muestra la letra P. Si se coloca la marcha atrás, en el indicador se muestra la letra R. Desde el emisor de sonido HA1 se escucha el intermitente y una serie de señales sonoras intermitentes, que además atraen la atención del conductor. La letra R tiene prioridad sobre la P. Esto significa que si se aplica la marcha atrás y el freno de mano al mismo tiempo, se mostrará la letra R y sonará una señal audible. Si el freno de mano o la marcha atrás no están puestos y el vehículo no está en movimiento, el indicador se convierte en una escala tacómetro pseudoanalógica. La altura de la columna de LED iluminados es proporcional al régimen del motor. La señal de pulso del sensor de velocidad de rotación se suministra a la entrada RA4 DD1 a través de la resistencia R2 y el diodo protector VD2. Para cada pulso, se incrementa el contenido del registro TMR0 del temporizador interno del microcontrolador. Como resultado, el número de pulsos contados por el temporizador durante un tiempo determinado es proporcional a la velocidad del cigüeñal. Si se para el motor, la columna se apaga. A una velocidad de rotación de no más de 1000 min-1, su altura es de un LED, a una frecuencia de 1000...2000 min-1 - dos, a 2000.3000-1 min-5000 - tres. Y así sucesivamente hasta seis LED a una frecuencia de 1 min-5500. Si la frecuencia es superior a 1 min-XNUMX, todo el indicador parpadea, advirtiendo al conductor que no aumente más la frecuencia sin carga en el motor. Cuando el automóvil está en movimiento, se envía una señal de pulso desde su sensor de velocidad a la entrada RB0 DD1 a través de la resistencia R1 y el diodo protector VD3. El programa del microcontrolador cuenta el número de estos pulsos durante los intervalos de tiempo entre los desbordes del temporizador TMR0, inversamente proporcional a la velocidad del cigüeñal. Por lo tanto, el resultado del cálculo es proporcional a la relación entre las velocidades de rotación del eje de salida de la caja de cambios y el cigüeñal del motor, es decir, con el embrague completamente acoplado: la relación de la caja de cambios. Los valores de muestra, basándose en la comparación con los que el programa llega a una conclusión sobre la marcha engranada (de la primera a la quinta), se almacenan en la EEPROM del microcontrolador. En función de la velocidad actual del motor, el programa analiza la exactitud de la selección de marcha. Se recomienda moverse en primera y segunda marcha a una velocidad del cigüeñal no superior a 3000 min-1. En la tercera y cuarta marchas, la frecuencia permitida se incrementa a 4000 min-1, y su valor mínimo en las marchas tercera a quinta se considera 1400 min-1. Cuando se exceden estos límites, el número de la marcha engranada en el indicador de dígitos se reemplaza por flechas, lo que indica que es necesario cambiar de marcha y en qué dirección. Después de 1,5.2 s se vuelve a mostrar el número de la marcha seleccionada. Cuando se presiona el pedal del embrague, es posible que los resultados del recuento de pulsos no correspondan a ninguna de las marchas disponibles. Esta situación está indicada por la letra C en el indicador. A veces el motor se cala mientras se conduce. Las razones pueden variar, pero en tal situación el mayor peligro es la pérdida de eficacia de los frenos. La letra D en el indicador le advierte sobre la necesidad de arrancar el motor. Conociendo las relaciones de transmisión de los pares de engranajes de la caja de cambios del vehículo y las características de los sensores de velocidad del motor y de velocidad de conducción instalados en él, es posible precalcular el número ejemplar de pulsos para determinar la marcha engranada e ingresarlos en la EEPROM. del microcontrolador al programarlo. Pero hay otra manera. Elija un tramo de carretera bastante largo, recto y con poco tráfico. Después de arrancar el motor, cierre el interruptor SA1. En el indicador se mostrará la letra K. Engrane la primera velocidad y comience a conducir. El microcontrolador contará los pulsos del sensor de velocidad y calculará la media aritmética de los resultados de las tres mediciones. El indicador mostrará el número de transmisión, el primero. Sin dejar de conducir, engrane la segunda marcha y espere hasta que aparezca su número en el indicador. Realizar las mismas operaciones con las marchas restantes, hasta quinta. Después de esto, los resultados obtenidos se escribirán automáticamente en la EEPROM. Sonará un pitido. Abra el interruptor SA1. El puntero está listo para usar. El sensor de posición neutral de la palanca de cambios se puede fabricar a partir de un imán permanente y un interruptor de láminas. El imán está montado en la palanca y el interruptor de láminas se coloca cerca de modo que se cierre bajo la influencia del campo magnético solo cuando la palanca esté en la posición neutral. En este caso, la letra N se mostrará en el indicador. El programa del microcontrolador se puede descargar desde ftp://ftp.radio.ru/pub/2013/08/indvkp.zip. Autor: S. Kashutin
Una nueva forma de controlar y manipular señales ópticas
05.05.2024 Teclado Primium Séneca
05.05.2024 Inaugurado el observatorio astronómico más alto del mundo
04.05.2024
▪ Libro electrónico Xiaomi InkPalm Plus ▪ Salchichas artificiales de cerdo ▪ Llama a través de la estratosfera ▪ La ansiedad es buena para la salud ▪ La computadora encadena la imaginación del diseñador
▪ sección del sitio Apuntes de conferencias, hojas de trucos. Selección de artículos ▪ artículo Serpiente Verde. expresión popular ▪ ¿Cuáles son las características específicas de Italia en los siglos IX-XI? Respuesta detallada ▪ artículo Artista de gráficos por computadora. Descripción del trabajo ▪ artículo Lavadora ultrasónica. Enciclopedia de radioelectrónica e ingeniería eléctrica. ▪ artículo Adivinanzas sobre transporte y tecnología
Hogar | Biblioteca | Artículos | Mapa del sitio | Revisiones del sitio
www.diagrama.com.ua |



 Deja tu comentario en este artículo:
Deja tu comentario en este artículo: