|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
ENCICLOPEDIA DE RADIOELECTRÓNICA E INGENIERÍA ELÉCTRICA La evolución de las fuentes de alimentación pulsadas flyback
Enciclopedia de radioelectrónica e ingeniería eléctrica. / Fuentes de alimentación El artículo que presentamos a la atención de los lectores está dedicado a las fuentes de alimentación conmutadas flyback, ampliamente utilizadas en fuentes de alimentación para televisores, computadoras y otros equipos electrónicos. Estas fuentes también son populares entre los radioaficionados. El artículo se centrará en las fuentes de alimentación ensambladas en los microcircuitos KR1033EU10 y VIPer-100A y en su cálculo mediante un paquete de software especializado. CONTROLADOR PWM KR1033EU10(iC3842) Las fuentes de alimentación conmutadas (SMPS) se generalizaron a mediados del siglo pasado. Y hoy en día las PII sufren cambios evolutivos casi todos los años. Cada clase de PII, una vez conquistada su nicho, permanece en él para siempre, o al menos durante mucho tiempo, y se desarrollan casi de forma independiente. Los SMPS puenteados se suelen utilizar como potentes (150 W o más). Los SMPS de corriente inversa se utilizan a menudo como de baja y media potencia (hasta 150 W). Ahora la base de elementos de tales fuentes se actualiza tan rápidamente que el radioaficionado medio y la industria de la radio nacional siguen estos cambios en sus desarrollos con gran retraso. Los controladores PWM integrados KR1033EU5 (análogo extranjero - TDA4605), que se describen en el artículo [1], aún no han tenido tiempo de introducirse en los electrodomésticos, pero en equipos de vídeo extranjeros, y especialmente en monitores de vídeo, su nueva variedad ya está disponible. ampliamente utilizado: UC3842, KA3842 y UC3844 , KA3844 (análogos nacionales de KR1033EU10 y KR1033EU11, respectivamente). Los controladores PWM, relativamente nuevos, no se diferencian externa y fundamentalmente del prototipo, pero han sufrido una serie de mejoras. Y si muchos radioaficionados ya se han familiarizado con el prototipo en las páginas de "Radio" en [2], entonces aún no se han publicado descripciones de los SMPS con controladores PWM de la serie UC384X, excepto [3], donde El microcircuito especificado se utiliza de una manera algo poco convencional: como regulador para un estabilizador de voltaje de pulso reductor. Consideremos brevemente las principales propiedades y diferencias entre el microcircuito KR1033EU10 (UC3842, KA3842), que luego llamaremos EU10, y el KR1033EU5 (TDA4605), llamado EU5. Ambos microcircuitos están fabricados en una caja de plástico 2101.8-1 (según terminología extranjera - DIP-8). La finalidad de los pines EU10 se indica en la tabla.
principales características
El controlador EU10 PWM, al igual que el EU5, está diseñado para conectar un transistor de efecto de campo de canal n con una puerta aislada y básicamente tiene la misma funcionalidad. Notemos la primera característica de EU10. La frecuencia de conversión en SMPS en EU5 se establece automáticamente según el voltaje de la red eléctrica, los parámetros del microcircuito y el transistor de conmutación, la inductancia del devanado primario del transformador de pulso, el consumo de energía en la carga, etc. Por lo tanto, cuando se expone a factores desestabilizadores, la frecuencia de conversión resulta "flotante": para cualquier SMPS fabricado en EU5, dependiendo únicamente de la potencia de carga, puede tomar un valor de 18 kHz como máximo y hasta 70 kHz en carga mínima. Esta característica dificulta un poco el diseño de un transformador de un SMPS de este tipo, por lo que generalmente primero se realizan un cálculo aproximado y una creación de prototipos y luego, en base a los resultados de las pruebas con una carga real, se realizan los ajustes necesarios. En el microcircuito EU10, la frecuencia de conversión operativa se establece mediante un circuito RC externo de ajuste de frecuencia conectado al pin 4. Dado que la resistencia del circuito RC está conectada a una fuente interna de voltaje de referencia de precisión de 5 V - pin 8, independientemente de varios desestabilizadores factores, la frecuencia de conversión operativa es estrictamente fija. En la Fig. 1, a muestra la forma exponencial del voltaje Uc en el capacitor de ajuste de frecuencia, correspondiente a los pulsos de conmutación en la salida del controlador PWM (pin 6 Uout), que se muestra en la Fig. 1, b.
Para caracterizar el modo de funcionamiento de un controlador PWM, es conveniente utilizar el ciclo de trabajo de los pulsos de conmutación D; este es el parámetro inverso de su ciclo de trabajo. El valor del ciclo de trabajo es siempre menor que uno. Sin embargo, no se recomienda elegirlo más de 0,5 [3]. Se ha introducido un disparador de conteo adicional interno en el circuito de salida del controlador PWM KR1033EU11 (UC3844), que limita el ciclo de trabajo D≤0,5, pero al mismo tiempo, el circuito RC de ajuste de frecuencia está diseñado para el doble de la frecuencia de operación de generador interno (en comparación con la frecuencia de repetición de los impulsos de conmutación). Al concluir una breve descripción general de los controladores PWM de la serie UC384X, observamos que el UC3843 es similar al UC3842 y el UC3845 es similar al UC3844, pero están diseñados para un voltaje de suministro más bajo. Para ellos, el nivel umbral de tensión de alimentación al cambiar al estado "Encendido" es para muestras individuales 7,8...9 V (valor medio 8,4 V), "Apagado" - 7...8,2 V (valor medio - 7,6 V ). Expliquemos el concepto de estabilidad del ruido de un controlador PWM (Fig. 1). Durante el tiempo toff, el condensador de ajuste de frecuencia se carga desde un voltaje de aproximadamente 1,5 V, correspondiente al nivel de umbral inferior del comparador interno, al superior, que es de aproximadamente 2,75 V. En este momento, la salida del El controlador PWM está bajo. Cuando el voltaje en el capacitor Uc alcanza el nivel de umbral superior, el circuito de descarga interno se enciende y el capacitor se descarga a aproximadamente 0,75 V. El voltaje en la salida del controlador PWM en este momento pasa al estado único. Luego durante el tiempo tON. Hasta que el voltaje a través del capacitor alcanza el nivel de umbral inferior, el transistor de conmutación se enciende. La figura muestra que una señal de interferencia Up con un voltaje de 0,1...0,5 V al final del ciclo de carga puede provocar un funcionamiento prematuro del circuito de descarga y un arranque en falso del generador interno, como se muestra con líneas de puntos. Esta propiedad es la principal desventaja de la clase de controladores PWM considerada, pero puede debilitarse significativamente de varias maneras. En primer lugar, se conectan condensadores cerámicos (baja inductancia) con una capacidad de aproximadamente 7 μF a los pines 8 y 0,1 del microcircuito. En segundo lugar, cumplen ciertos requisitos en cuanto a la topología de la placa de circuito impreso y el diseño del SMPS, que reducen la amplitud de las señales perturbadoras, que se explicarán más adelante. En tercer lugar, se elige que la capacitancia del condensador de ajuste de frecuencia sea de al menos 1000 pF. Y la forma más confiable de eliminar por completo este inconveniente es sincronizar la frecuencia de funcionamiento del controlador PWM con una fuente externa de voltaje de pulso, que se describe en detalle en [4]. La segunda diferencia principal entre el EU10 es la forma en que monitorea la corriente de operación en el SMPS. En EU5, el cambio de corriente en el devanado de almacenamiento del transformador se simula mediante un circuito RC externo y, si estos elementos se seleccionan incorrectamente, el transistor de conmutación puede fallar. El microcircuito EU10 tiene un comparador de control de corriente especial, que tiene dos entradas: inversora y no inversora. El pin 3 está conectado internamente a la entrada no inversora del comparador. Se le conecta externamente un sensor de corriente resistivo o de transformador en el circuito fuente del transistor de conmutación. Tan pronto como el voltaje de la señal del sensor de corriente exceda el valor umbral de 1 V, correspondiente al valor máximo de corriente en el circuito de drenaje del transistor, el comparador apagará el amplificador de salida del controlador PWM. Por ejemplo, para un transistor con una corriente de drenaje máxima de 4 A, el valor pico correspondiente al nivel de respuesta de protección se elige en 3,7 A. Cuando el SMPS está sobrecargado, dicho apagado se producirá en cada pulso, evitando daños al transistor de conmutación. El nivel de respuesta de protección actual se puede ajustar cambiando la resistencia de la resistencia en el circuito de drenaje del transistor o cambiando el coeficiente de transmisión del sensor de corriente del transformador. Y la última, tercera característica del EU10, que se deriva de la segunda, es el método para regular el voltaje en la salida del SMPS. Tenga en cuenta que el principio de regulación sigue siendo el mismo: control de ancho de pulso. Si EU5 controla el momento de finalización de la transferencia de la siguiente parte de la energía mediante la transición del voltaje en los devanados secundarios a través de cero y luego emite dicha nueva porción para mantener constante el voltaje en la salida de la comunicación auxiliar bobinado y, por lo tanto, bajo carga, entonces EU10 funciona de manera algo diferente. Para regular el voltaje de salida del SMPS, así como para neutralizar la influencia negativa de los factores desestabilizadores, se utiliza la entrada del amplificador de señal de error: pin 2, al que se conecta un devanado auxiliar adicional del transformador, formando así un externo bucle de retroalimentación, llamado bucle de control primario. El amplificador monitorea la influencia perturbadora de los factores desestabilizadores y ajusta los parámetros de los pulsos de conmutación para que el voltaje en la salida del devanado de comunicación y en la carga permanezca constante. Las propiedades de frecuencia y fase de la característica de transferencia del amplificador de señal de error, que determinan su estabilidad, están reguladas por un circuito RC externo conectado al pin 1, que está conectado internamente a la salida de este amplificador. Gracias a esta arquitectura del microcircuito, los desarrolladores han brindado la posibilidad de utilizar el pin 1 para el apagado remoto o de emergencia del SMPS (transferencia al MODO DE ESPERA - modo de espera), conectándolo a un cable común mediante un transistor externo. Si a este pin se conecta un sensor optoelectrónico, conectado eléctricamente a la salida, se obtiene un segundo circuito de control de voltaje de salida, que mejora las propiedades estabilizadoras del SMPS y, además, permite un arranque "suave" del SMPS. La estabilización del voltaje de salida del SMPS se produce de la siguiente manera. La salida del amplificador de señal de error dentro del microcircuito se conecta mediante circuitos de adaptación a la entrada inversora del comparador de control de corriente. Un sensor de corriente está conectado a la entrada no inversora del comparador. En el comparador de corriente, desde el momento del inicio de cada pulso de conmutación, se comparan estas dos señales. Si las señales coinciden, cada pulso de conmutación se detendrá en el momento en que la corriente en el devanado de almacenamiento alcance el valor máximo requerido. En modo normal, esto sucederá mucho antes de que la corriente máxima alcance el valor límite de la corriente de drenaje del transistor de conmutación. A su vez, la corriente máxima determina la potencia operativa del transformador. La energía almacenada en el devanado de almacenamiento de un transformador con inductancia L está determinada por la igualdad W = LIP2/2, y si se detiene la acumulación de energía en este momento, cuando la corriente que aumenta linealmente en el devanado alcanza el valor pico requerido IP, la Los circuitos de energía secundarios recibirán la porción necesaria de energía. Además, si, a un voltaje constante de la red eléctrica U0, comparamos dos versiones del convertidor, que difieren, digamos, en un factor de dos en la frecuencia de conversión, la inductancia del devanado de almacenamiento también debería diferir en un factor de dos. Esto es necesario para cambiar la tasa de aumento de la corriente en diente de sierra, determinada por la relación U0 /L. Por lo tanto, por ejemplo, si la corriente en el devanado a una frecuencia de conversión de 100 kHz en el momento de la acción del pulso de conmutación alcanza un valor máximo después de 2 μs, entonces a una frecuencia de 50 kHz debido a la duplicación de la inductancia en el Mismo voltaje U0 - después de 4 μs. La potencia para ambas opciones sigue siendo la misma, ya que en la expresión que la caracteriza P=W/T (T=1/f es el periodo de la frecuencia de conversión) tanto el numerador como el denominador cambiarán proporcionalmente. Pero las dimensiones del núcleo magnético del transformador para estas opciones diferirán significativamente: cuanto mayor sea la frecuencia, menor será el núcleo magnético requerido para la misma potencia. De manera similar, con una inductancia L constante y un voltaje cambiante U0, el intervalo de tiempo tON variará. durante el cual la energía se acumula en el devanado primario del transformador, ya que es inversamente proporcional a la relación U0/L. Así, la energía almacenada en cada pulso permanece constante e independiente de factores desestabilizadores. Los radioaficionados que quieran estudiar con más detalle el diagrama de bloques, la descripción funcional y las características de diseño del microcircuito EU10 pueden consultar el libro de referencia [4]. FUENTE DE ALIMENTACION EN CHIP KR1033EU10 Esquema de la versión más simple propuesta del SMPS. cuya base es el controlador PWM KR1033EU10 (UC3842, KA3842), que se muestra en la Fig. 2.
Principales parámetros de SMPS
La fuente de tensión de red, así como los filtros de red de baja y alta frecuencia, están diseñados de manera similar al prototipo [2] y no tienen características especiales, excepto que el elemento que limita el aumento de corriente cuando se enciende el SMPS es un termistor RK1 con un TCR negativo. Cuando se enciende, su resistencia es máxima y luego, a medida que se calienta bajo la influencia de la corriente consumida por el dispositivo, disminuye. Esto ayuda a proteger el puente de diodos de la red VD1 contra daños durante el inicio. Sin embargo, con un reinicio rápido, la eficacia de dicha protección es baja. El divisor de voltaje R1 - R3 en el circuito amplificador de señal de error proporciona regulación y estabilización del voltaje de salida SMPS utilizando el circuito de control primario. La resistencia R6 proporciona energía al microcircuito en modo de inicio, cuando la corriente que consume no supera 1 mA. Después de encender el SMPS, la tensión de red rectificada a través de la resistencia limitadora R6 se suministra al condensador de filtro C11 en el circuito de alimentación del microcircuito. Cuando el voltaje en el capacitor alcanza el nivel umbral para que el microcircuito pase al estado "encendido" (valor típico - 16 V), el comparador se activa y se suministrará energía a todos los elementos del controlador PWM, después de lo cual el interno Se enciende la fuente de voltaje de referencia, luego el generador de pulsos de conmutación y el amplificador de salida. El SMPS cambia del modo de arranque al modo de funcionamiento, proporcionando energía al microcircuito desde el devanado de comunicación auxiliar del transformador a través del diodo VD5. La corriente consumida por el microcircuito aumenta a 11...17 mA. Si el voltaje en la red disminuye, el voltaje de salida del SMPS y el voltaje de suministro del microcircuito disminuirán gradualmente. La tasa de disminución del voltaje de salida es cientos de veces menor que el voltaje de entrada debido a la estabilización, pero llegará un momento en que el voltaje de suministro del microcircuito alcanzará el nivel umbral para cambiar al estado "apagado" (valor típico - 10V). En este momento, el comparador funcionará y se apagará la alimentación de todos los elementos del controlador. La diferencia (6 V) entre los niveles de umbral para encender y apagar el microcircuito (histéresis del voltaje de suministro) es necesaria para evitar la conmutación errática de los circuitos de alimentación en el modo de inicio. La tasa de repetición de los pulsos de conmutación (la frecuencia operativa de conversión a SMPS) está determinada por los parámetros del circuito R5C8. Para que la frecuencia de conversión corresponda al valor calculado f = 30 kHz, puede ser necesario seleccionar las clasificaciones de los elementos de ajuste de frecuencia. Más adelante se discutirá cómo determinar los valores requeridos de los elementos de ajuste de frecuencia para una frecuencia de operación diferente. Al diseñar la versión descrita del SMPS, se prestó especial atención a garantizar su estabilidad acústica. En gran medida, la estabilidad general del amplificador de señal de error del controlador y, por tanto, del SMPS, está determinada por los parámetros del circuito de compensación R4C5. Los siguientes elementos cumplen el mismo propósito: diodo VD2, que elimina las sobretensiones negativas en relación con el cable de alimentación común del microcircuito cuando disminuyen los pulsos de conmutación; Diodo Zener VD3. limitar las oleadas "bruscas" de voltaje positivo en los frentes de los pulsos de conmutación; inductor L2 y resistencia limitadora de corriente R7, que evitan la autoexcitación del transistor de conmutación a altas frecuencias. Los condensadores cerámicos C9 y C10, conectados directamente a los pines 7 y 8 del microcircuito, aumentan significativamente la estabilidad del amplificador. En el sensor de corriente, la resistencia R11, se forman pulsos de voltaje en diente de sierra para los circuitos de regulación y protección, cuyo valor máximo depende de la corriente de drenaje del transistor de conmutación. La amplitud de la señal se vuelve igual a 1 V con una corriente de drenaje de 3,7 A. Esto garantiza una protección confiable del transistor contra daños. El condensador de óxido C13 conectado en paralelo con la resistencia reduce significativamente el ruido de conmutación, evitando el funcionamiento incorrecto del comparador de control de corriente. El condensador C7 cumple el mismo propósito. El condensador C6 regula la inclinación del voltaje en diente de sierra en los pines 3 y 4 del microcircuito, reduciendo significativamente la interferencia de alta frecuencia, lo que también garantiza la estabilidad requerida del controlador. No se requieren medidas menos efectivas para reducir la amplitud de la interferencia generada en el SMPS. Un papel muy importante en esto lo desempeña la pantalla electrostática instalada en el transformador de impulsos. El disipador de calor en el que está instalado el transistor de conmutación también emite una fuerte interferencia si el disipador de calor no está conectado a un cable común y el transistor no está aislado de él con una placa de mica. Las corrientes de pulso que fluyen por los conductores conectados al drenaje del transistor de conmutación y al devanado de salida generan interferencias importantes. Para debilitarlos, en el SMPS descrito el transistor se conecta al transformador con un trozo corto de cable coaxial, y el conductor impreso que conecta el diodo rectificador y el devanado de salida se elige de longitud mínima y sección transversal grande. Es bastante obvio que una contribución significativa a la creación de interferencias la realizan los procesos de conmutación que ocurren cuando el transistor se enciende y se apaga. La presencia de una capacitancia entre electrodos de fuente de drenaje en un transistor de efecto de campo, así como una capacitancia distribuida y una inductancia de fuga en los devanados del transformador, conduce, en el momento de apagar el transistor, a la aparición en su drenaje, primero de un aumento "brusco" de voltaje significativo y luego una señal de alta frecuencia amortiguada exponencialmente. La frecuencia de llenado de esta señal, a menos que se tomen medidas especiales, está determinada por la inductancia de fuga del transformador y la capacitancia entre electrodos del transistor. El circuito amortiguador VD4R10C12, conectado en paralelo al devanado de almacenamiento del transformador, suprime las oscilaciones libres en esta señal y "vincula" la sobretensión a la fuente de alimentación de la red. Normalmente, en los convertidores flyback, un condensador adicional con o sin una resistencia y un diodo conectados en serie en paralelo se conecta al drenaje del transistor de conmutación en relación con el cable común (fuente). Estos elementos no solo suprimen eficazmente los procesos de conmutación, sino que también ayudan a reducir la tasa de aumento de voltaje en el drenaje del transistor en el momento de su apagado, evitando así la peligrosa disipación de energía instantánea en el transistor y transfiriendo la combinación de máxima operación. voltaje de funcionamiento actual y máximo en el área de modos de funcionamiento seguros. En el SMPS descrito, esta función la realiza con éxito el inductor L3. El voltaje de salida rectificado se suministra a la carga a través de un filtro en forma de U, por lo que la ondulación del voltaje de salida se reduce al nivel requerido. El condensador C17 conecta los circuitos de entrada y salida del SMPS a alta frecuencia, debilitando efectivamente la interferencia generada y mejorando significativamente la compatibilidad electromagnética del SMPS con los dispositivos conectados a los circuitos de alimentación. En la figura 3 se muestra un dibujo de la placa de circuito impreso SMPS. 1,5. Está hecho de un laminado de fibra de vidrio de una cara con un espesor de 2 mm y básicamente repite el diseño del prototipo [XNUMX]. La excepción son las grandes áreas de metalización continua que quedan en la placa, que ayudan a aumentar la inmunidad al ruido del dispositivo.
En el dispositivo se utilizan piezas y elementos no deficientes. Condensador C1 - K73-17 para una tensión nominal de 630 V, C2, C3 - K15-5, C12 y C17 - K78-2 o K15-5 para una tensión nominal de al menos 1000 V. Condensador de óxido C4 - K50-32 . Está permitido reemplazarlo con el K50-35B nacional o un análogo importado. Para los condensadores C9 y STO - KM-5 - los cables se acortan al mínimo óptimo y se sueldan directamente a los pines 5,7, 8 y 13 del microcircuito desde el lado de los conductores impresos. Condensador de óxido C53 - K14-11 u otro condensador de tantalio C50 - K35-14. Los condensadores de óxido C16 - C50 son importados. Puedes utilizar los domésticos, pero sus tamaños son un poco más grandes. Todos los demás condensadores son condensadores cerámicos con una tensión nominal de al menos XNUMX V. Se puede reemplazar un termistor importado SCK105, donde los primeros tres caracteres alfabéticos indican la serie, el cuarto y quinto caracteres digitales indican la resistencia nominal en ohmios a una temperatura de 25 ° C y el último dígito indica la corriente máxima de funcionamiento en amperios. con uno doméstico de similares parámetros. Todas las resistencias son OMLT, a excepción de la resistencia importada R11, que en tamaño corresponde aproximadamente al OMLT-1 nacional. Resistencia recortadora R2 - SPZ-38b. Reemplazaremos el puente rectificador KTs405A (VD1) con diodos separados con un voltaje inverso permitido de al menos 400 V y una corriente de al menos 1 A. Diodo D310 (VD2) con una corriente directa permitida de 0,5 A y un voltaje inverso de 20 V se puede sustituir por uno moderno con barrera Schottky, cuya caída de tensión directa a corriente máxima no supere los 0,5 V. Reemplazaremos el diodo Zener (VD3) por cualquier otro de baja potencia con un voltaje de estabilización de 16. ..18 V. El diodo de pulso en lugar de VD4 (KD257D) debe estar diseñado para una frecuencia de operación de al menos 50 kHz, voltaje inverso máximo de 1000 V y corriente máxima de 3 A. El diodo KD220B (VD5) se reemplazará con KD220A o otro con parámetros similares. El diodo rectificador KD213B (VD6) con una frecuencia de funcionamiento de hasta 100 kHz puede soportar un voltaje inverso de 200 V y una corriente máxima de 10 A. Está permitido conectar diodos similares en paralelo, diseñados para una corriente más baja, sin corriente resistencias de ecualización. También es posible utilizar diodos modernos. Reemplazaremos el transistor KP707V2 con análogos importados con un voltaje máximo de fuente de drenaje de al menos 700 V y una corriente de drenaje permitida de al menos 4 A. Se instala en un disipador de calor con un área de enfriamiento efectiva de 100. .200 cm2 mediante una placa de mica recubierta por ambas caras con pasta termoconductora KPT-8. El terminal de drenaje del transistor en el lado de los conductores impresos de la placa se conecta al transformador con un trozo corto de cable coaxial con un diámetro exterior de unos 5 mm, habiendo pasado previamente el núcleo central a través de un tubo de ferrita. En la Fig. La Figura 3 muestra convencionalmente los puntos inicial y final para conectar el inductor L3, pero no se muestra la imagen del segmento de cable. Para eliminar interferencias adicionales, la trenza del cable debe conectarse al cable común en lugares estrictamente definidos: por un lado, en las inmediaciones del punto de conexión del diodo VD4 y el terminal 3 del transformador, por el otro, en el Punto común de potencial cero R11C13. El tubo de ferrita se pega a través de una junta aislante a la placa en el lado de los conductores impresos debajo de los elementos R11, C13. Está permitido sustituir el estrangulador industrial del filtro de línea L1 por uno casero. Se enrolla en dos conductores MGTF 0,35 en una grabadora de radio con anillo de ferrita 1500NM-2000NM con un diámetro exterior de aproximadamente 20 mm hasta que se llena. Los chokes L2 y L3 son tramos de tubos de 5...7 y 10...12 mm de longitud, respectivamente, fabricados en ferrita de alta frecuencia, utilizados en chokes DM-1,0, etc. Para obtener los valores de inductancia indicados en el diagrama, para el inductor L2 necesitará una vuelta de cable PEVT de 0,41, y para L3, dos vueltas. En la versión del autor, se utilizaron productos importados similares y se requirió una vuelta (paso pasante) para cada inductor. El estrangulador L4 está enrollado en un trozo de varilla con un diámetro de 10 y una longitud de 35...40 mm hecha de ferrita 400NN. Su devanado contiene 30 vueltas de cable PEV-2 1,5. El núcleo magnético del transformador T1 se ensambla a partir de dos mitades Ш12x20x21 de ferrita M3000NMS2, utilizada en fuentes de alimentación para televisores 3(4)USCT, etc., con un espacio no magnético en la varilla central de 2,4 mm. Los devanados se enrollan en un marco estándar con terminales de contacto, cuya numeración corresponde a la que se muestra en el diagrama. Se realizan de la siguiente manera. Primero, se enrolla la primera sección del devanado primario: 26 vueltas de PEVT 0,41 en dos cables. Está aislado con dos capas de tejido barnizado de 0,05 mm de espesor. Sobre el aislamiento se enrolla un devanado de salida de 25 vueltas de cable PEV-2 1,5. En este caso, se retiran los terminales 10, 12 y 14 del marco, y como terminales se utiliza un alambre enrollado, pasándolo por las ranuras entre los terminales 10 y 12, 12 y 14, respectivamente. En el diagrama, los números de terminal se denominan convencionalmente 10a y 12a. Luego se colocan dos capas de aislamiento y encima se enrolla una segunda sección del devanado primario que contiene 44 vueltas. Por último, el devanado de comunicación auxiliar se enrolla a partir de 12 vueltas de cable PEVT con un diámetro de 0,15...0,21 mm, distribuyéndolo uniformemente por todo el ancho del marco y cubriéndolo con otra capa de aislamiento en la parte superior. Después de pegar las placas de ferrita del transformador, los devanados junto con el núcleo magnético se cubren con una pantalla electrostática hecha de una capa de lámina de cobre. El número de vueltas en los devanados está determinado por el núcleo magnético y el espacio no magnético, por lo que deben recalcularse para otro núcleo magnético. El SMPS se conecta a la red mediante un cable de dos hilos, en cuyo espacio se conecta un interruptor PKn41 o un interruptor de palanca TV2-1, así como un fusible de 2 A. Si durante la fabricación del transformador no se altera la fase de los devanados y se utilizan piezas reparables, la configuración del dispositivo se reduce a configurar el voltaje de salida con la resistencia de ajuste R2. El uso de elementos del circuito de ajuste de frecuencia R5C8 sin su selección preliminar puede provocar una ligera desviación de la frecuencia de funcionamiento del valor calculado. El tipo y las capacidades de la mayoría de los elementos utilizados en el SMPS se determinaron de acuerdo con los resultados del diseño asistido por computadora, que se discutirá más adelante. CARACTERÍSTICAS DE DISEÑO DE SMPS INVERSAS Quizás el IIP descrito satisfaga completamente a algunos radioaficionados y decida repetirlo sin cambiar nada. Pero la probabilidad de que ocurra tal evento es muy, muy pequeña: dependiendo del alcance de los intereses de los radioaficionados, y siempre son multifacéticos, es posible que necesite una fuente cuyos parámetros difieran significativamente de los indicados. Por lo tanto, en la mayoría de los casos prácticos, será necesario modificar el dispositivo descrito y realizar ciertos cambios. El grupo de empresas STMicroelectronics que produce componentes radioelectrónicos ha desarrollado y vende una línea de microcircuitos bajo el nombre comercial VIPer en el mercado mundial, incluido el ruso. Sin entrar en detalles sobre la abreviatura utilizada, solo notamos que este producto es una versión integrada del fragmento principal del SMPS, que incluye un transistor de conmutación y un controlador PWM. Según los desarrolladores, estos microcircuitos deberían facilitar significativamente el trabajo de los diseñadores y operadores de SMPS. Un cierto aumento (de 2 a 4 veces, dependiendo del microcircuito seleccionado) en el costo de la base de elementos del SMPS conmutado por VIPer, en comparación con su diseño discreto, se compensa completamente con las posibilidades del diseño asistido por computadora, así como como restauración rápida de la funcionalidad simplemente reemplazando el microcircuito en caso de mal funcionamiento. Para el diseño automatizado de SMPS basados en microcircuitos VIPer, la misma empresa ha desarrollado un paquete de software de distribución gratuita VIPer Design Software. La última versión del programa (v2.12) con una capacidad de 4 MB se puede descargar desde el sitio web del desarrollador. . Este paquete de software, en lo sucesivo denominado DS (software de diseño), se puede utilizar con éxito para diseñar la versión descrita del SMPS basado en el controlador PWM UC3842. Una interfaz fácil de usar le permite completar una tarea tan compleja en cuestión de minutos. Antes de usar DS, aclararemos algunas características de diseño relacionadas con la selección de elementos y la configuración de la frecuencia operativa de conversión en SMPS. Hay que recordar que en los transformadores flyback pulsados el circuito magnético siempre se realiza con un espacio no magnético en la varilla central (núcleo). Estamos hablando de transformadores con placas en forma de W, así como de núcleos magnéticos KB (análogo extranjero de RM) modernos [5, 6]. Prestemos también atención a la preferencia por el uso de ferrita para transformadores de impulsos, por ejemplo, marca M3000NMS-2, cuyo nombre contiene el símbolo C. Esto es un signo de la capacidad de un cable magnético hecho de este material para trabajar en fuertes campos magnéticos, lo que se debe, a diferencia de otros, al coeficiente de temperatura negativo de las pérdidas específicas. A pesar de la disminución de la eficiencia y el deterioro de la compatibilidad electromagnética del transformador con otros elementos, no se puede abandonar el espacio no magnético. En primer lugar, en campos magnéticos fuertes, la brecha evita la saturación del circuito magnético y, en segundo lugar, con la elección correcta del modo de funcionamiento del transistor de conmutación, la presencia de la brecha evita un aumento excesivo en el valor de amplitud de los pulsos de corriente en su circuito de drenaje. Por lo tanto, hay que soportar pérdidas y tener en cuenta el hecho de que la intensidad de la radiación parásita asociada con los armónicos fundamentales y superiores de la frecuencia de conversión operativa aumenta relativamente rápido después de 100 kHz. Por supuesto, hay materiales magnéticos en los que los dominios están separados entre sí por una sustancia no magnética (por ejemplo, de un magnetodieléctrico basado en molibdeno permalloy grados MP-60, MP-140, MP-160, MP-250, etc.), hay un espacio en ellos, ya que está distribuido por todo el volumen de trabajo del núcleo magnético y por lo tanto, en principio, es posible utilizar núcleos magnéticos sólidos sin espacio. La segunda fuente de pérdidas en SMPS es la creciente resistencia de los conductores devanados debido a una disminución en la profundidad de penetración del campo a frecuencias más altas. Por tanto, para reducir las pérdidas provocadas por este fenómeno, es recomendable realizar el devanado a partir de varios conductores paralelos, cuya sección transversal sea equivalente a la original, pero la superficie lateral a lo largo del perímetro de la sección transversal. de los conductores es varias veces mayor. Más precisamente, el aumento de la superficie lateral en este caso es proporcional a la raíz cuadrada del número de conductores paralelos. La tercera fuente de pérdidas está asociada con la inversión de magnetización del circuito magnético. Y finalmente, la última, cuarta fuente de pérdidas se debe a la necesidad de utilizar varios circuitos de condensadores resistivos que supriman los procesos de conmutación transitorios y a la velocidad limitada de los radioelementos utilizados en los SMPS: condensadores de óxido, transistores de efecto de campo, diodos rectificadores. . El voltaje no sinusoidal (pulso) en estos elementos y la gran amplitud de corriente (hasta varios amperios) provocan una parte importante de las pérdidas en ellos. Todas estas pérdidas deben tenerse en cuenta al diseñar SMPS utilizando DS. Dado que las pérdidas en un transformador provocan el calentamiento de sus devanados y del núcleo magnético, para evaluarlas se utiliza uno de los criterios: o el aumento de temperatura permitido del transformador sin su enfriamiento forzado, que generalmente se elige dentro del rango de 30... 50 °C, o la gravedad específica de las pérdidas se considera igual al 1 ... 5% de la potencia del transformador. El desempeño general del SMPS se evalúa sobre la base de la eficiencia. En el mejor de los casos, su valor puede alcanzar el 92...95%, en el peor, el 60...65%. SELECCIÓN DEL TRANSISTOR DE CONMUTACIÓN Y DIODOS RECTIFICADORES El transistor de conmutación se puede seleccionar sin ningún cálculo con un margen múltiple. Pero este problema se puede resolver de forma más racional. ¿Cómo determinar los parámetros que debe cumplir un transistor de conmutación, en función de las características técnicas del SMPS diseñado? Lamentablemente, el paquete DS no responde directamente a la pregunta planteada. Por lo tanto, primero consideramos la forma del voltaje del pulso en el drenaje del transistor Uc (Fig. 4).
De acuerdo con los datos iniciales, a una tensión nominal de red de 220 V en la salida del rectificador de red, sin tener en cuenta la caída de tensión entre los diodos rectificadores y el termistor, obtenemos [7] U0 = 220√2 =310 V. Además, en el drenaje del transistor hay una tensión adicional Uañadida a la tensión de red rectificada. En la literatura extranjera y en DS se le llama UR (reflejado - reflejado, inducido). Como muestran los resultados del diseño de prueba de varias variantes de transformadores de impulsos, su valor siempre resulta muy cercano al valor predeterminado propuesto en DS de 80 V. Mostraremos cómo determinar el valor real de la tensión adicional. El voltaje a través de la inductancia es directamente proporcional a la tasa de cambio de corriente en ella: U = LΔI/Δt o U·Δt = L·ΔI. Dado que los cambios de corriente cuando se enciende y apaga el transistor son los mismos para un proceso en estado estacionario, las áreas de los rectángulos designados S+ y S- en la figura. 4. Calculando sus áreas obtenemos la ecuación Uo·D·T = Uadd(1-D)T o tras transformaciones Uadd = Uo·D /(1-D). Por otro lado, de acuerdo con la interpretación geométrica del proceso de transferencia de energía, la tensión de salida en el devanado secundario es la tensión adicional transformada en el devanado primario: Uadd = k·Uout, donde k = wl/wout es el coeficiente de transformación (wl, wout es el número de vueltas de los devanados primario y de salida respectivamente). Estrictamente hablando, la suposición de que cada porción de energía tomada de la red en el primer ciclo se transfiere completamente a la carga en el segundo ciclo, como se muestra en la Fig. 4 como una línea continua, y la transmisión termina exactamente en el momento en que se enciende el transistor, es hasta cierto punto condicional. En realidad, SMPS puede funcionar en dos modos: modo de flujo magnético continuo y modo de flujo intermitente. En la práctica, esto significa que si cuando se enciende el transistor de conmutación, la corriente en los devanados es cero, entonces este modo corresponde al modo de flujo intermitente. De lo contrario, se produce un régimen de flujo continuo. En la Fig. La Figura 5 muestra diagramas de voltaje y corriente en los elementos SMPS: Uc - voltaje en el drenaje del transistor; lс - corriente de drenaje del transistor de conmutación; lw out - corriente en el devanado secundario; UH es el voltaje a través de la carga.
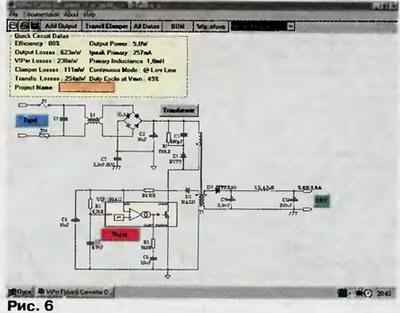
El modo de corriente continua corresponde a la Fig. 5, a. Su característica principal es que el transistor se enciende con una determinada corriente de drenaje. La ventaja de este modo es la corriente máxima más baja en los elementos SMPS en comparación con otros modos y la ondulación del voltaje de salida más baja. Si, cuando la tensión de red se reduce al mínimo, el ciclo de trabajo puede aumentar por encima del 50%, DS advierte al usuario sobre la necesidad de realizar ajustes en los cálculos. Esto se debe a las peculiaridades de la magnetización del circuito magnético en modo de pulso de un solo ciclo y a la posibilidad de aumentar la amplitud de la corriente de drenaje del transistor por encima del límite permitido. El modo de corriente intermitente se muestra en la Fig. 5, c. Una vez completado el proceso de transferencia de energía, el diodo se cierra. En los devanados, a medida que disminuye el voltaje del pulso, surgen oscilaciones libres amortiguadas. Este modo se caracteriza por la mayor amplitud de corriente en los elementos SMPS y la máxima ondulación del voltaje de salida. El modo óptimo es la transición entre los dos modos nombrados, como se muestra en la Fig. 5B. El programa DS le permite controlar la amplitud, la forma de la corriente y el voltaje en el transistor, así como determinar el modo de funcionamiento del SMPS diseñado y el valor del ciclo de trabajo del pulso en cualquier voltaje de red posible. Una adición significativa al voltaje que actúa en el drenaje del transistor se realiza mediante la inductancia de fuga (en DS se denomina inductancia de fuga). Está directamente relacionado con los campos parásitos en el transformador. Durante la acción de los pulsos de conmutación, cuando el transistor está abierto, la energía se acumula no solo en el devanado acumulativo, sino también en la inductancia de fuga. Cuando el transistor se apaga, esta energía provoca la aparición de un aumento de voltaje adicional en su drenaje, como se muestra en la Fig. 4 líneas de puntos. Para limitarlo se utilizan cadenas amortiguadoras. En el programa DS, puede seleccionar un circuito de resistencia-condensador (RC Clamper) o un diodo Zener limitador (Transil Clamper). Calcular la inductancia de fuga y el pico de tensión asociado es una tarea muy compleja, ya que es necesario tener en cuenta la inductancia y la capacitancia dinámica entre espiras de los devanados, el espacio no magnético en el núcleo magnético del transformador, la sección de los devanados y los parámetros de diseño. de su diseño y muchos otros factores. El programa DS utiliza un cierto valor promedio de inductancia de fuga, que el usuario puede cambiar a la fuerza si es necesario. El nivel de limitación de sobretensión en cada caso específico del diseño SMPS se puede monitorear en la ventana Forma de onda (oscilograma) y tenerse en cuenta al elegir un transistor en función del voltaje máximo permitido de la fuente de drenaje. Seleccionar un diodo rectificador en un DS es sencillo. La ventana OUT (salida) proporciona la información necesaria sobre sus parámetros: corriente directa e inversa, caída directa y voltaje inverso máximo permitido. DISEÑO AUTOMATIZADO DE SMPS INVERSAS Entonces, encienda la computadora e inicie el programa DS. Aparece una pantalla de presentación en la pantalla del monitor durante unos segundos y luego se abre una ventana (Fig. 6). De forma predeterminada, el programa carga un proyecto "en blanco" con el nombre "Default.vpa".
Movemos el cursor del mouse al botón azul de Entrada en pantalla y aparece una información sobre herramientas en la pantalla del monitor: Edición de parámetros de línea de CA (edición de parámetros de red de CA). Pulsamos el botón. La ventana Parámetros de entrada aparece en la pantalla del monitor, como se muestra en la Fig. 7.
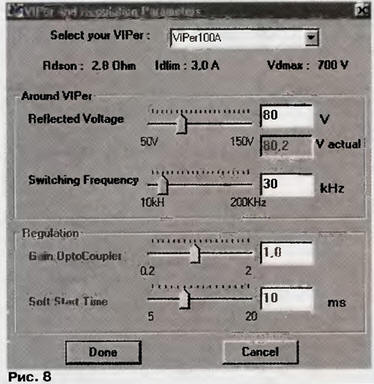
En la sección Frecuencia de línea (frecuencia de red) configuramos 50 Hz, en la sección Rango de entrada de CA (intervalo de voltaje alterno de entrada) usando el control deslizante, o después de colocar el cursor en la ventana correspondiente, escribiendo desde el teclado, configuramos el Voltaje mínimo (voltaje mínimo) y voltaje máximo (voltaje máximo), el primero - con una precisión de 5 V, el segundo -10 V. Puede configurar cualquiera de los voltajes desde el teclado con una precisión de 1 V. Para la mayoría de los dispositivos, el Se considera que el cambio permitido en el voltaje de la red es -10...+5% del valor nominal o después de redondear para aumentar el intervalo - 195...240 V. Puede establecer el intervalo un poco más amplio, pero en cualquier caso No debe dejarlo configurado por defecto, ya que cuanto más grande sea, más estrictos serán los requisitos para la base de elementos utilizada. Luego, en la misma ventana vamos a la sección Ondulación de entrada (amplitud de ondulación del voltaje de entrada) y configuramos su valor requerido. De este parámetro dependerá la capacitancia del capacitor del filtro rectificador de red y la amplitud de la ondulación del voltaje de salida, que a su vez también depende de la corriente de carga y de la capacitancia del capacitor del filtro de salida. El valor de ondulación aceptable es 10...30 V. Configure 30 V y haga clic en el botón Listo - listo (puede usar el botón Cancelar para cancelar los cambios realizados, si es necesario). La ventana Parámetros de entrada se cerrará automáticamente y el sistema realizará algunos ajustes: por ejemplo, la capacitancia del condensador del filtro del rectificador de red cambiará. En la siguiente etapa de diseño, procedemos a configurar la frecuencia de conversión operativa y la selección preliminar del transistor de conmutación, para lo cual presionamos el botón VIPer. En la ventana VIPer y parámetros de regulación que aparece (Fig. 8), en la ventana Seleccione su VIPer, abra la lista desplegable de productos y seleccione VIPer 100A. Ahora, justo debajo de su nombre, se mostrarán los principales parámetros: Rdson: 2,8 Ohm (resistencia de la sección drenaje-fuente cuando está encendida); Idlim: 3,0 A (límite de corriente de drenaje); Vdmax: 700 V (tensión máxima de drenaje). En la sección Around VIPer, el sistema deja establecido el valor de voltaje reflejado y la frecuencia de conmutación se establece en 30 kHz. Esto reducirá las pérdidas y prescindirá de piezas escasas, aunque para minimizar el tamaño del transformador es mejor utilizar una frecuencia más alta, hasta 100 kHz. La sección de Reglamento permanece inactiva y no se puede editar. Esto sólo se puede hacer después de introducir un bucle de control secundario. Haga clic en el botón Listo. La ventana se cerrará automáticamente.
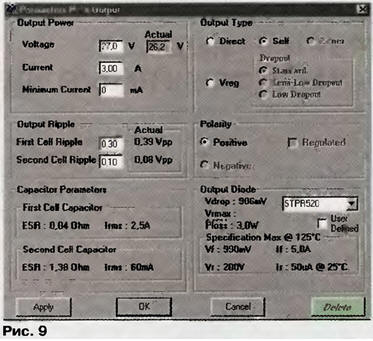
Después de eso, vaya al botón verde Salir. En la ventana Parámetros de salida principal que se abre (parámetros de la fuente de voltaje de salida principal) (Fig. 9), proceda a editar la sección Potencia de salida: en la ventana Voltaje, configure 27 V; en la ventana Actual marcamos 3 A; en la ventana Corriente mínima dejamos el programa configurado en 0 mA, lo que supone la capacidad de operar en modo inactivo.
A continuación, edite la sección Tipo de salida (filtro de salida). Puede dejar instalado el filtro LC predeterminado en forma de U. Si selecciona Directo (un filtro es un condensador conectado en paralelo con la carga), es posible que necesite un condensador muy grande. Al seleccionar Vreg (regulador de voltaje), se instalará un regulador de voltaje lineal integrado adicional en la salida. En este caso, debe especificar el valor de caída (caída de voltaje a través del estabilizador). Existe la opción de elegir entre estándar (estándar), baja caída (baja) y semibaja (media). Deje el filtro de salida en Self. Pasemos a editar el valor de ondulación del voltaje de salida: la sección Ondulación de salida: en la ventana Ondulación de la primera celda (ondulación en la primera etapa) establezca 0,3 V, Ondulación de la segunda celda (ondulación en la segunda etapa) - 0,1 V. Después de todo manipulaciones anteriores, haga clic en el botón Aplicar. El programa calculará inmediatamente los parámetros de los elementos del circuito de salida y presentará los resultados del cálculo para el diodo rectificador: Vdrop: 906 mV - caída de tensión directa, Vrmax: 150 V - tensión inversa máxima (desafortunadamente, un defecto de representación del software existente en ese momento de escritura le permite ver solo la parte superior de los píxeles del elemento especificado), Ploss: 3 W - pérdidas en el diodo; Especificación Max@125 °C - parámetros del diodo STPR520 a la temperatura especificada: Vf: 990 mV - caída de tensión directa, If: 5 A - corriente directa permitida, Vr: 200 V - tensión inversa máxima; Ir: 50 uA a 25 °C: corriente inversa máxima a la temperatura especificada. Utilizando el libro de referencia, seleccionamos un análogo doméstico cercano del KD213B. Cabe señalar que debido a la forma de la tensión del pulso, que es muy diferente de la del meandro, el diodo rectificador, que participa en la formación de una tensión relativamente baja de 27 V, experimenta una tensión inversa significativamente mayor (aproximadamente 150 V). y tenga en cuenta este hecho al elegir diodos. Después de completar esta etapa de diseño, haga clic en el botón Aceptar de la ventana abierta Salida principal de parámetros, después de lo cual se cierra. Y la última etapa de diseño está asociada con la edición de los parámetros del transformador de impulsos. Haga clic en el botón gris Transformador, después de lo cual se abrirá la ventana Diseño de Transformador, que se muestra en la Fig. 10.
La ventana contiene dos secciones principales: Transformer Parameters y Transformer Outlook, cuyo contenido corresponde al transformador cuyo tamaño se indica en la sección Core Size. El programa utiliza el tamaño de núcleo magnético mínimo permitido, de acuerdo con el criterio de evaluación de pérdida predeterminado Aumento de temperatura en la sección Criterios de selección de núcleo. Frente a este criterio hay una casilla de verificación, en una línea que indica sus valores: Objetivo 40°С (permisible) y Real 34,8°С (real). En este caso, los valores del criterio menor Potencia Disipada corresponden a Objetivo 2%, Real 2,2%. Este último, por exceder la norma establecida, se muestra en la ventana sobre un fondo rojo. Si selecciona el segundo criterio como principal (mueva la casilla de verificación junto a su nombre) y luego hace clic en el botón Aplicar, los parámetros del transformador cambiarán inmediatamente. En la ventana Geometría de la sección Tamaño del núcleo, las dimensiones de cada placa se muestran en el siguiente orden: ancho/alto/espesor E36/18/11 Serie E (geometría para la serie E, un análogo extraño de las placas en forma de W) . El análogo doméstico W 10x10 tiene casi las mismas dimensiones. Si lo usas, puedes pasar a la siguiente sección. Si dicho núcleo magnético no está disponible, pero hay Ш12x20x21 hecho de ferrita M3000NMS2, utilizado en fuentes de alimentación para televisores 3(4) USCT y otros, es necesario recalcular los parámetros del transformador. Para hacer esto, en la sección Tamaño del núcleo, marque la casilla en la ventana Fijo y haga clic en el botón Editar, después de lo cual aparecerá la ventana Tamaño del núcleo (Fig. 11).
Dejamos la forma del núcleo magnético de la serie E sin cambios (si es necesario, en la misma ventana puede seleccionar otro núcleo magnético de la lista proporcionada, por ejemplo, la serie RM10). A continuación, en la ventana Geometría, seleccione un tamaño estándar cercano al E42/21/20 existente. Haga clic en el botón Aceptar, después de lo cual se cerrará la ventana Tamaño del núcleo. Ahora en la sección Tamaño del núcleo puede leer los parámetros del núcleo magnético seleccionado: Ae 236 mm2 (área de sección); Le 98 mm (longitud media de la línea magnética); Lm 85 mm (longitud promedio de la bobina); W 200 mm2 (área de la sección transversal de la ventana); Ve 23100 mm3 (volumen del núcleo magnético). Tenga en cuenta: después de aumentar el tamaño, la pancarta roja correspondiente al criterio no principal Potencia disipada desapareció; anteriormente su valor real de 2,2% excedía el requerido, pero ahora ha vuelto a la normalidad y es 1,4%. Pasemos al contenido de la sección Material del núcleo (material del núcleo magnético). Por defecto el programa ofrece: Tipo N27, Proveedor SIEMENS (ferrita marca N27 de SIEMENS). Comparando sus parámetros con las características de las ferritas domésticas M3000NMS2 que figuran en el libro de referencia [8], observamos su buena concordancia. Si tiene que utilizar alguna otra ferrita, debe marcar la casilla en la ventana Definido por el usuario y hacer clic en el botón Editar, después de lo cual aparecerá la ventana Material del núcleo del transformador, como se muestra en la Fig. 12.
Le permite seleccionar el fabricante y la marca de ferrita, cuyos parámetros se muestran en la misma ventana. Es importante tener en cuenta que no importa qué ferrita elija, el valor del parámetro Inductancia primaria (consulte la Fig. 10) permanece sin cambios. Pasemos a la sección Transformer Outlook (parámetros de salida del transformador), que proporciona información sobre los devanados del transformador. Ahora puede reescribirlos (o imprimirlos en una impresora, existe esa opción) y comenzar la implementación práctica. Algunos errores de cálculo, como cualquier otro factor desestabilizador, serán compensados por las unidades de control automático del controlador PWM, pero esto reducirá el margen de estabilidad del SMPS ante otras influencias perturbadoras. Por lo tanto, es mejor tomarse su tiempo y ajustar los resultados del diseño asistido por computadora, acercándolos lo más posible a los reales. CORRECCIÓN DE RESULTADOS DE DISEÑO Volvamos de nuevo a la ventana de diseño de transformadores, que se muestra en la fig. diez. En la sección Selección de Cables Conductores Paralelos dejaremos la casilla de verificación predeterminada del programa en el ítem Single Wire, que corresponderá al uso de conductores individuales en el devanado. Si selecciona el ítem //Cables (conductores paralelos) y en la ventana correspondiente corrige los 10 conductores instalados por el sistema a un número estimado diferente, dependiendo de la frecuencia de operación, el programa recalculará los devanados del transformador con nuevos valores iniciales. Es posible utilizar conductores del mismo diámetro para todos los devanados. Para hacer esto, simplemente marque la casilla en la ventana Diámetro único y presione el botón Aplicar. Nos limitaremos al uso de conductores individuales de varios diámetros. Ahora en la sección Transformador Outlook puede leer información de referencia sobre todos los devanados: Entrada AWG20 75T 1W (primario - cable No. 20 según el estándar AWG, 75 vueltas de un solo cable), Auxiliar AWG42 13T 1W (auxiliar - cable No. 42 , 13 vueltas), Salida AWG 13 26T 1W (salida - cable No. 13, 26 vueltas). Para conocer el diámetro del cable en milímetros, vaya a la sección Detalles de AWG y haga clic en uno de los tres botones de colores, cuyo color corresponde al color de los devanados. El nombre correspondiente del devanado aparece en el encabezado Detalles de AWG, y sus parámetros geométricos y eléctricos aparecen debajo. Por ejemplo, para bobinado auxiliar (Aux) Ø64 um Iso 76 um; Rdc = 6,9 R; Rac = 6,9 R (diámetro - 64 µm = 0,064 mm, con aislamiento - 0,076 mm; resistencia CC - 6,9 ohmios; resistencia CA - 6,9 ohmios). La sección Uso del transformador proporciona estándares básicos que caracterizan algunas de las reservas que se deben proporcionar al diseñar un transformador. Estos incluyen Window Factor Utilization (factor de llenado de la sección de ventana), que por defecto no debe exceder el 80%, y Bsat Margin (margen para la inducción máxima en el circuito magnético) relativo a la inducción en modo de saturación Bsat 380 mT - no menos de 25 %. El valor calculado de la inducción magnética de la densidad de flujo de 116 mT es sólo aproximadamente el 30% del máximo posible, es decir, el margen es del 70% y se cumple el margen requerido. Una inducción magnética tan baja se debe al entrehierro no magnético indicado aquí, igual a 2,28 mm. De acuerdo con el algoritmo de diseño, el programa calculó que la inductancia del devanado primario debe ser de 0,73 mH. Pero si se adopta un enfoque crítico sobre los resultados del diseño, es necesario tener en cuenta de antemano el error en los cálculos. Los libros de referencia sobre productos de ferrita indican que sus parámetros electromagnéticos pueden diferir de los valores indicados en un ±25%. Por lo tanto, es mejor no confiar en el azar y no sobrecargar el complejo de factores desestabilizadores con influencias perturbadoras adicionales, sino corregir los resultados del diseño. Esto se refiere, en primer lugar, a la inductancia del devanado primario del transformador. Ya que al desarrollar un SMPS, un radioaficionado puede tener a su disposición un circuito magnético con un espacio no magnético diferente al calculado. Esta circunstancia también indica la necesidad de tener en cuenta la inductancia real del devanado primario. Las fórmulas matemáticas conocidas no permiten calcular la inductancia del devanado primario con alta precisión, ya que no tienen en cuenta la fuerte influencia del espacio no magnético sobre la permeabilidad magnética efectiva del material del núcleo magnético. Por lo tanto, la forma más sencilla es enrollar un devanado de prueba con el número de vueltas más bajo en un circuito magnético existente. mida su inductancia Lsonda y luego calcule el número de vueltas w requeridas para una inductancia L dada: w = wsonda√ Muestras L/L. Es obvio que la inductancia del devanado depende muy poco del diámetro del conductor. Puede suceder que el radioaficionado no tenga a su disposición el surtido de cables de bobinado que requiere el sistema, pero existe un juego de cables de diferente diámetro con los que se puede fabricar un transformador. Por ejemplo, para el devanado primario el programa recomienda utilizar un cable con un diámetro de 0,812 mm. Además, a una frecuencia de conversión de 30 kHz, no podrá "forzar" al programa a cambiar a conductores paralelos. Sin embargo, en la mayoría de los transformadores de impulsos para fuentes de alimentación de televisión, los devanados están formados por varios conductores paralelos. Realicemos esta operación fuera del sistema de diseño asistido por computadora. A partir de la condición de igualdad de las superficies laterales, igualando las circunferencias de conductores simples y paralelos, determinamos su diámetro: d2 = d1/2 -0,41 mm. La inductancia del devanado primario del transformador, que contiene 26 vueltas de dos conductores PEV-2 0,41, enrollados en un núcleo magnético hecho de placas de transformador Ш12x20x21 con un espacio no magnético en la varilla central de 2,4 mm, resultó ser igual a 103 µH. Para obtener la inductancia requerida de 730 µH, el devanado debe constar de aproximadamente 70 vueltas. Ajustemos proporcionalmente el resto de espiras recomendadas por el programa: w2 = (70/75)·13 -12 vueltas; wvyx = (70/75) 26 - 24 vueltas. La inductancia real del devanado primario de un transformador fabricado de acuerdo con los parámetros indicados es aproximadamente igual a 770 μH, lo que concuerda bien con el cálculo. Para el devanado de salida, el programa recomienda utilizar un cable con un diámetro de 1,8 mm, y la resistencia del devanado para corriente continua será de 25 mOhm y para corriente alterna, de 38 mOhm. Desafortunadamente, el autor no tenía el cable necesario a su disposición, por lo que tuvo que ser reemplazado por uno existente de otro diámetro: 1,5 mm. El inevitable aumento de la resistencia del devanado y la correspondiente disminución de la tensión de salida deberán compensarse aumentando el número de vueltas en 25. Un margen significativo del aumento de temperatura calculado del transformador (15,5 ° C frente a los 40 ° C permitidos) da la derecho a esperar la validez de tal ajuste. Completando el cálculo del transformador, determinamos el voltaje adicional Uadd = (70/25) 27 = 75,6 V, y teniendo en cuenta la eficiencia - 81,6 V, que es muy cercano al establecido por el programa, y por tanto al VIPer. ventana (ver Fig. 8), no es necesario que regrese. Pasamos a la elección de un transistor de conmutación. En la barra de herramientas DS, haga clic en el botón Forma de onda (oscilograma), después de lo cual aparecerá la ventana que se muestra en la Fig. 13, en el que se pueden observar simultáneamente hasta cuatro parámetros SMPS diferentes por elección.
Dejamos las dos ventanas que ofrece el sistema para visualizar oscilogramas, y en la primera ventana mostramos la dependencia Idrain = f(Vin)@Pmax (dependencia de la corriente de drenaje de la tensión de entrada con el máximo consumo de energía), y en la segunda - Vdrain = f(Vin)@Pmax (dependencia del voltaje de drenaje del voltaje de entrada con el máximo consumo de energía). Al cambiar el voltaje de entrada usando el control deslizante en la barra de desplazamiento, puede explorar la naturaleza de la transformación de los parámetros especificados. De estos diagramas podemos sacar las siguientes conclusiones: con todos los cambios permitidos en el voltaje de la red y los parámetros de carga, el SMPS diseñado funciona en modo de corriente intermitente; esto se evidencia además en la inscripción en la esquina superior derecha de las ventanas con oscilogramas; la amplitud de la corriente de drenaje del transistor de conmutación a la tensión de red máxima es de 2,7 A; a voltaje mínimo, la amplitud de la corriente sigue siendo la misma y el ciclo de trabajo de los pulsos de conmutación aumenta de 0,18 a 0,24; la tensión máxima en el drenaje del transistor (a la tensión máxima de red) alcanza los 640 V. Los resultados obtenidos nos permiten concluir que para el SMPS diseñado está permitido utilizar un transistor de efecto de campo KP707V2 u otro, cuya corriente de drenaje máxima es de 4 A, y el voltaje máximo de fuente de drenaje es de 700 V. Para obtener los resultados del diseño asistido por computadora de SMPS, basta con hacer clic en el botón BOM (Bill Of Materials - lista de elementos) en la barra de herramientas de DS (ver Fig. 6), después de lo cual aparecerá la ventana BOM List. aparecen (Fig. 14). Si es necesario imprimir la lista de elementos, haga clic en el botón Imprimir.
Recordemos que el cálculo se realizó para un SMPS conmutable por VIPer, pero en realidad está ensamblado sobre la base de un controlador PWM UC3842. A pesar de todas sus similitudes y similitudes, todavía existe una diferencia significativa que no se puede ignorar en ningún caso. Esto se debe al hecho de que en el primer caso, la resistencia de ajuste de frecuencia está conectada directamente a la fuente de alimentación del microcircuito +15 V, y en el segundo, a la fuente interna de voltaje estabilizado +5 V. Por lo tanto, en Para garantizar la frecuencia requerida de los pulsos de conmutación f = 30 kHz con un ciclo de trabajo de valor promedio D = (0,18 + 0,24)/2 = 0,21, es necesario ajustar las clasificaciones del circuito RC de ajuste de frecuencia. La frecuencia del oscilador en el chip UC3842 se determina dependiendo de las clasificaciones del circuito RC mediante la relación f-1,72/RC. El tiempo tOFF, durante el cual el transistor de conmutación permanece apagado (ver Fig. 1), está relacionado con el período de pulso T y el ciclo de trabajo D mediante la igualdad tOFF = T(1-D). Por otro lado, este tiempo también viene determinado por los parámetros del circuito RC: tOFF = RCIn[(0,00063R-2,7)/(0,00063R-4)]. Sustituyendo estas fórmulas y luego potenciando la última igualdad, obtenemos la ecuación R = {2,7-4exp[(1-D)/1,72]}/ /{0,00063[1-exp[(1-D)/1,72 ,XNUMX]] }. Con base en el ciclo de trabajo promedio requerido D = 0,21, obtenemos R = 9,889 kOhm y C = 5798 pF. Quizás un encendido de prueba de los SMPS muestre que necesitan algún ajuste. Para eliminar una desviación significativa en la frecuencia y el ciclo de trabajo de los pulsos de conmutación de los calculados, recomiendo usar un dispositivo de medición digital para seleccionar una resistencia y un capacitor con los valores requeridos. El dispositivo desarrollado se puede mejorar, por ejemplo, agregando sincronización de la frecuencia de operación del controlador PWM con una fuente de voltaje de pulso externo, apagado remoto del SMPS, un circuito de control de voltaje de salida secundario y arranque "suave", utilizando aleación permanente de molibdeno. , así como los modernos núcleos magnéticos GAMMAMET [9]. Literatura
Autor: S. Kosenko, Voronezh
Una nueva forma de controlar y manipular señales ópticas
05.05.2024 Teclado Primium Séneca
05.05.2024 Inaugurado el observatorio astronómico más alto del mundo
04.05.2024
▪ Cámaras plenópticas para dispositivos Nokia ▪ Nuevo procesador RAMTRON FM4005 ▪ Gracias a NXP, los chips inteligentes han reducido su peso a la mitad ▪ Antiguo Cementerio de los Atletas
▪ Sección de televisión de la web. Selección de artículos ▪ artículo Miller. Instrucción estándar sobre protección laboral
Hogar | Biblioteca | Artículos | Mapa del sitio | Revisiones del sitio
www.diagrama.com.ua |










 Deja tu comentario en este artículo:
Deja tu comentario en este artículo: