|
|






 Arabic
Arabic Bengali
Bengali Chinese
Chinese English
English French
French German
German Hebrew
Hebrew Hindi
Hindi Italian
Italian Japanese
Japanese Korean
Korean Malay
Malay Polish
Polish Portuguese
Portuguese Spanish
Spanish Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese|
ENCICLOPEDIA DE RADIOELECTRÓNICA E INGENIERÍA ELÉCTRICA Taladro semiautomático con puntero láser. Enciclopedia de radioelectrónica e ingeniería eléctrica.
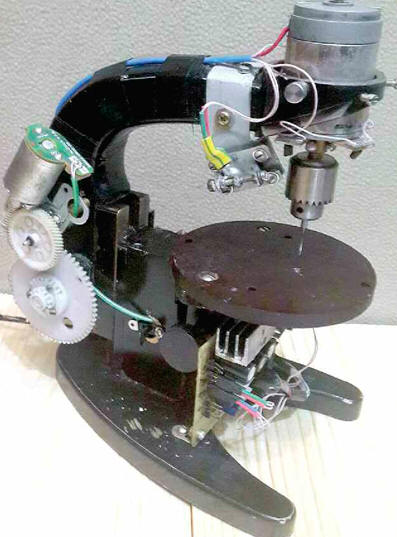
Enciclopedia de radioelectrónica e ingeniería eléctrica. / Tecnologías de radioaficionados Para taladrar agujeros en las placas de circuito impreso, muchos radioaficionados utilizan los llamados microtaladros, que son un motor de corriente continua en miniatura, en cuyo eje se fija una pinza de perforación. Como herramienta para procesar placas de circuito impreso, los microtaladro están lejos de ser ideales: es bastante difícil llegar al centro exacto del futuro orificio sin perforar, y es casi imposible lograr la posición vertical exacta del microtaladro con las manos. El resultado es un agujero "oblicuo" de mala calidad, cuyo centro está desplazado en el otro lado del tablero, o incluso una broca rota (es especialmente fácil romper una broca de carburo costosa, que está hecha de un material muy frágil). material). Hay muchas opciones para las máquinas de perforación en el mercado, pero todas tienen avance de perforación manual y una holgura significativa, y desde el "software" electrónico contienen solo una fuente de alimentación y un estabilizador de velocidad para el motor de accionamiento. La máquina perforadora de fabricación propia descrita en el artículo le permite perforar agujeros sin perforaciones previas. La lógica de su trabajo está controlada por un microcontrolador. Al trabajar en esta máquina, las costosas brocas de carburo no se rompen. Gracias al uso de tales taladros, se mejora la calidad de los orificios: literalmente cortan un orificio, por lo que después de perforar no es necesario procesar la lámina con papel de lija, lo que hace que la lámina delgada de los conductores impresos sea aún más delgada. He perforado más de 1500 orificios en esta máquina con una sola broca de carburo (hecha en Alemania) y aún no se ha roto y continúa perforando orificios de alta calidad. Un taladro barato generalmente deja de perforar bien después de 10 a 20 orificios en fibra de vidrio recubierta con lámina, por lo que debe aumentar la velocidad del taladro y aumentar la presión al perforar, como resultado, se forman rollos de lámina alrededor de los orificios y después de taladrar, Se requiere un procesamiento completo de los conductores con papel de lija. La máquina (su apariencia a la izquierda, derecha y atrás se muestra en la Fig. 1-3, respectivamente) está hecha sobre la base del microscopio doméstico MBI-3 fabricado por la asociación LOMO. Su funcionamiento está controlado por la unidad de control (CU), cuyo diagrama se muestra en la Fig. 4. Se basa en el microcontrolador ATtiny45 [1]. Cuando se aplica energía, la unidad de control coloca la máquina en su posición original, es decir, si su parte móvil estaba en la posición inferior o intermedia, automáticamente sube a la posición superior inicial. A continuación, el tablero a procesar se coloca debajo del rayo láser (se aseguran de que el rayo láser incida en el centro del orificio), lo presionan contra la mesa de trabajo con la mano y presionan el pedal. Al mismo tiempo, la unidad de control suministra energía al motor eléctrico del accionamiento del portabrocas y al motor de avance del taladro. Al final de la perforación, el motor de avance de la broca devuelve la máquina a su estado original y la unidad de control apaga ambos motores. La máquina está lista para perforar el siguiente agujero.
Como puntero láser, se usa un módulo láser modificado, que se usa en juguetes para niños. Es necesario enfocar el colimador láser a una distancia corta y limitar la corriente de suministro, que debe ser tal que el láser comience a brillar. Esto permite un haz más delgado (pude lograr un diámetro de haz de 0,2 mm) y reduce la radiación láser a un nivel seguro. La unidad de montaje del láser ensamblada se muestra en la fig. 5, y dibujos de sus detalles - en la fig. 6. La base 3 y el soporte del láser 4 están hechos de chapa de acero de aproximadamente 1 mm de espesor (utilicé las paredes de la caja de un viejo CD-ROM). Habiendo perforado los agujeros necesarios en los espacios en blanco, los pétalos rectangulares se doblan en el soporte 4 en ángulo recto para sujetar el tornillo con el módulo láser. El módulo está desmontado, el punto de soldadura de su cuerpo de latón y dos tuercas M3 están estañados. El tornillo 4 (M5x3) se inserta en los orificios de los pétalos doblados del soporte 28 y ambas tuercas 8 se atornillan de manera que queden entre las orejetas del soporte (ver Fig. 5). El cuerpo del láser 2 se inserta debajo del tornillo 5 (entre las tuercas 8) y las tuercas se sueldan para que encaje perfectamente contra el soporte (esto es necesario para que el láser se mueva sin juego cuando se gira el tornillo durante el ajuste).
A continuación, se atornillan dos tuercas 5 más en el extremo sobresaliente del tornillo 1 (una de ellas será una contratuerca) y se aprietan para que las orejetas del soporte 4 eviten que el tornillo 5 se mueva a lo largo del eje. Ahora, cuando el tornillo se gira en el sentido de las agujas del reloj y en la dirección opuesta, el módulo láser se moverá de una lengüeta a la otra. Para fijar el soporte con el láser en la base 3, se sueldan cuatro tuercas a este último en el reverso (se ven claramente en la Fig. 2). Luego, cuatro tornillos 7 (M3x15) con arandelas 6 colocados debajo de las cabezas se insertan en los orificios correspondientes del soporte desde el lado del láser, y se les colocan resortes de compresión cilíndricos, luego de lo cual se atornillan en las tuercas soldadas a la base. . Ahora, con la ayuda de tornillos, puede ajustar la posición del láser en diferentes direcciones. La estructura ensamblada se prueba en el soporte del tubo (parte superior del microscopio), el vástago de la base del soporte del láser se dobla alrededor y, transfiriendo los contornos de los agujeros en la base al soporte del tubo con un trazador afilado, dos se perforan agujeros con un diámetro de 2,5 y una profundidad de 10 mm y se corta la rosca M3 en ellos. Finalmente, fije la base del soporte del láser en el microscopio con tornillos M3. Para alimentar el taladro se utilizó un motor eléctrico con tornillo sinfín de una videograbadora (desarmé el dispositivo durante mucho tiempo, por lo que no puedo indicar su nombre). Este mecanismo (Fig. 7) se fija al portatubos del microscopio mediante tres postes metálicos con rosca interna y externa M4 e igual número de tornillos M4. El engranaje se fija en el mango del microscopio con tres tornillos M2,5 con tuercas, los agujeros en ambas partes son pasantes. Se debe tener cuidado durante el montaje: la desalineación del engranaje y el mango debe ser mínima.
La velocidad de alimentación está regulada por una resistencia de sintonización R11. El motor eléctrico utilizado es de baja potencia (tensión nominal - 6 V, corriente - 30 mA), pero gracias al engranaje helicoidal, cumple bastante bien su tarea. El diseño de la caja de cambios puede ser cualquiera, pero debe proporcionar suficiente fuerza para girar fácilmente el mango del microscopio. Puedes usar un motor paso a paso. En el primer proyecto, hice exactamente eso, pero el motor paso a paso existente tenía un par de torsión insuficiente en el eje y no pude encontrar uno adecuado. Si alguien tiene interés en usar un motor paso a paso, puede contactarme a través de los editores. Los archivos del proyecto se guardan. Utilizaba el microcontrolador ATmega8. La llave en el transistor compuesto VT5VT6 enciende y apaga el motor de avance del taladro (está conectado al enchufe XP6), el transistor VT2 y el relé K1 controlan su dirección: hacia arriba o hacia abajo. La llave en el transistor compuesto VT3VT4 controla el motor de accionamiento del taladro (está conectado al enchufe XP3), se ensambla un estabilizador de frecuencia en el microcircuito DA1 y el transistor VT1, y la resistencia de sintonización R1 ajusta la frecuencia. No tiene sentido utilizar un estabilizador de velocidad más complejo, por ejemplo, como se propone en [2], ya que no es necesario “apuntar” con un taladro al centro del agujero “a ojo”. Se han llevado a cabo experimentos sobre este asunto. En el chip DA6, se ensambla un regulador de voltaje para el suministro del motor de avance del taladro [3]. Los estabilizadores integrales DA2 y DA5 conectados en serie están diseñados para obtener tensiones estabilizadas de 12 y 5 V, respectivamente. Condensadores C3, C4, C2 - filtrado, el resto - bloqueo. La máquina tiene iluminación LED. La corriente de retroiluminación y la corriente del láser están estabilizadas: se ensambla un estabilizador de corriente láser en el chip DA3 y los LED de retroiluminación están en el DA4. La corriente de estabilización se calcula mediante la fórmula I = 1,25 / R [3] y se establece mediante una selección de resistencias R13 y R14. Debido a la corriente estabilizada, es posible conectar en serie varios LED retroiluminados del mismo tipo. El láser está conectado al enchufe XP4, los LED están conectados al XP5. El conector XP7 está diseñado para conectar el programador. La finalidad de sus contactos corresponde al programador "TRITON + V5.7T USB" [4]. El programa del microcontrolador se desarrolló en el entorno integrado Code VisionAVR V2.05 [5, 6]. Un sensor de dos posiciones de las posiciones extremas superior e inferior del taladro y un botón de inicio de perforación están conectados al conector XP2. Este último está conectado a los pines 2 y 4, el sensor de posición superior, a los pines 1 y 4, el inferior, a los pines 3 y 4. El sensor y el botón tienen contactos normalmente abiertos que, cuando se activan, cierran un común cable. Un interruptor de límite montado en el pedal se utiliza como botón. El sensor de posición se utiliza desde el reproductor de DVD del centro de música. El funcionamiento del sensor en la posición inferior se ajusta para que el taladro no caiga más de 1 mm por debajo del tablero procesado. El sensor de posición superior regula la carrera máxima de la broca, no tiene sentido que sea superior a 20 mm. El ajuste se realiza moviendo los bastidores de alambre elástico 3 (Fig. 8), fijados con tornillos 6 (M3) en el soporte 5. Los tornillos se atornillan en placas rectangulares roscadas a través de una ranura en el soporte, que le permite mover los limitadores hacia arriba y hacia abajo. Se utilizan placas roscadas, en lugar de tuercas estándar, para poder fijar la posición de los postes en la posición encontrada sin usar ninguna herramienta para evitar que las tuercas giren mientras se aprietan los tornillos 6. Puede soldar las placas a las tuercas . El soporte se fija con tornillos 4 en el soporte del tubo y el sensor 2 - en el soporte en forma de L atornillado a la base del microscopio. El dibujo del soporte 5 se muestra en la fig. 9, está realizado, al igual que las partes del portaláser, en chapa de acero.
La tensión de alimentación de la máquina depende del motor de accionamiento del taladro utilizado, pero no debe ser inferior a 14 V. Utilicé un motor de movimiento del cabezal de impresión de una impresora de inyección de tinta Canon con una tensión de alimentación nominal de 24 V. La tensión de alimentación de la la máquina se seleccionó con un margen de ajuste - 30 V. El consumo de corriente es dispositivos totales en estado estable (durante la perforación) - 1,5 A, en el momento de arrancar los motores, aumenta brevemente a 3 A. Por lo tanto, la fuente de alimentación debe proporcionar un voltaje de salida de 30 V con un consumo de corriente de al menos 3 A. Utilizo una fuente de alimentación de laboratorio de conmutación casera con un estabilizador lineal 0 ... 50 V, 0 ... 10A. La limitación de corriente proporciona un arranque suave de los motores. Los detalles de la unidad de control están montados en una placa de circuito impreso hecha de fibra de vidrio de lámina de un lado, hecha de acuerdo con el dibujo que se muestra en la fig. 10. El patrón de conductores impresos se aplica exponiendo una imagen de un negativo fotográfico sobre una lámina de la pieza de trabajo recubierta con una fotoprotección. La fotomáscara negativa se puede imprimir con una impresora de inyección de tinta a la máxima calidad.
Las resistencias fijas R3, R7-R9, R15, los capacitores cerámicos C1, C4, C5, C7 (todos los tamaños 0805 para montaje en superficie) y el microcontrolador DD1 (en paquete SOIC8) están soldados directamente a los conductores impresos. El resto de las resistencias son MLT-0,25, los capacitores son de óxido importado. Transistores VT1, VT4, VT6 - cualquier serie KT805, KT819, VT3, VT5 - BC337, BC547, 2N2222, serie KT315, KT3102; VT2 - ВС337, 2N2222, cualquiera de las series KT630, KT815, KT972 (el valor máximo de su corriente de colector no debe ser inferior a la corriente de funcionamiento del relé K1). Se puede usar un transistor de la serie KT5 o KT6 como tecla VT829VT972, y un transistor KT3 o KT4 con cualquier índice de letras se puede usar como tecla VT827VT829. Relé K1 - R40-11D2-5/6, puede ser reemplazado por cualquier otro con una tensión de respuesta de 5 V y con dos grupos de contactos de conmutación clasificados para corriente de conmutación de al menos 1 A. Puede utilizar un relé de 12 V por conectando la salida superior (según el diagrama) sus devanados (junto con el diodo VD1) a la salida (pin 3) del chip DA2. La placa de control se instala debajo de la mesa y se fija con tornillos M3 a través de las esquinas a la base del microscopio (ver Fig. 1). Los chips DA2 y DA5 están instalados en disipadores de calor. Es deseable proporcionar un disipador de calor y un transistor VT1. La mesa está hecha de textolita. Antes de convertirlo en una máquina perforadora, el microscopio debe desmontarse, lavarse a fondo con un lubricante bastante viscoso que impida el movimiento del soporte del tubo (la parte superior del microscopio) y lubricarse con un lubricante líquido, por ejemplo, aceite de transformador. . El movimiento de la parte superior debe ser lo más fácil posible, suave y sin juego. Se decidió abandonar el uso de un collar clásico para sujetar un taladro. Se utilizan un cono Morse y un mandril de tres mordazas para brocas con un diámetro de 0,3-4,5 mm. La conexión del motor con el cartucho debe estar libre de golpes. El ajuste del punto láser en el tablero procesado con la ayuda de tornillos se lleva a cabo en el siguiente orden: se perfora un orificio en una placa de lámina de fibra de vidrio similar a la que está hecha el tablero, luego el punto láser se ajusta exactamente al orificio con los tornillos de ajuste del soporte. En este caso, debe intentar no desplazar la placa. En mi experiencia, si el punto láser desaparece (deja de reflejarse en la lámina), entonces el rayo láser ha entrado en el orificio y está alineado. El espesor de la fibra de vidrio debe ser el mismo que el del tablero fabricado. Después de eso, puede estar seguro de que el láser indicará con precisión el centro del futuro agujero. Con piezas reparables y una instalación sin errores, la unidad de control no necesita ser ajustada. La máquina ha estado en funcionamiento durante más de un año. Durante la operación, ambas manos están libres y, por lo tanto, es conveniente trabajar en la máquina. No he roto un solo taladro, aunque hago tablas con bastante frecuencia y no sé cómo me las arreglé sin esta máquina antes. Ahora compro audazmente taladros caros de alta calidad. Perforar 50 agujeros no lleva más de media hora. Pero aún así, se necesita cuidado, existe el peligro de romper un taladro frágil al instalar el tablero en la mesa de trabajo de la máquina, golpeando el taladro sin darse cuenta. La probabilidad de rotura del taladro durante la perforación es pequeña, a menos que, por supuesto, mueva el tablero en este momento. Se puede descargar el programa del microcontrolador, así como las fotomáscaras negativas y positivas en formato .pdf para transferir el patrón de los conductores impresos a la placa de circuito impreso en blanco. desde ftp://ftp.radio.ru/pub/2015/07/stanok.zip. Literatura
Autor: I. Parshin
Máquina para aclarar flores en jardines.
02.05.2024 Microscopio infrarrojo avanzado
02.05.2024 Trampa de aire para insectos.
01.05.2024
▪ Entre las abejas, también hay diestras y zurdas. ▪ La electrónica gobierna los genes ▪ Los drones SkyOrbiter proporcionarán acceso a Internet ▪ Tarjeta de pago inteligente BrilliantTS
▪ Sección del sitio: Resolviendo un cubo de Rubik. Selección de artículos ▪ artículo Pegamento y tijeras. expresión popular ▪ artículo de girasol. Leyendas, cultivo, métodos de aplicación. ▪ artículo Micromotores eléctricos. Enciclopedia de radioelectrónica e ingeniería eléctrica.
Hogar | Biblioteca | Artículos | Mapa del sitio | Revisiones del sitio
www.diagrama.com.ua |










 Deja tu comentario en este artículo:
Deja tu comentario en este artículo: